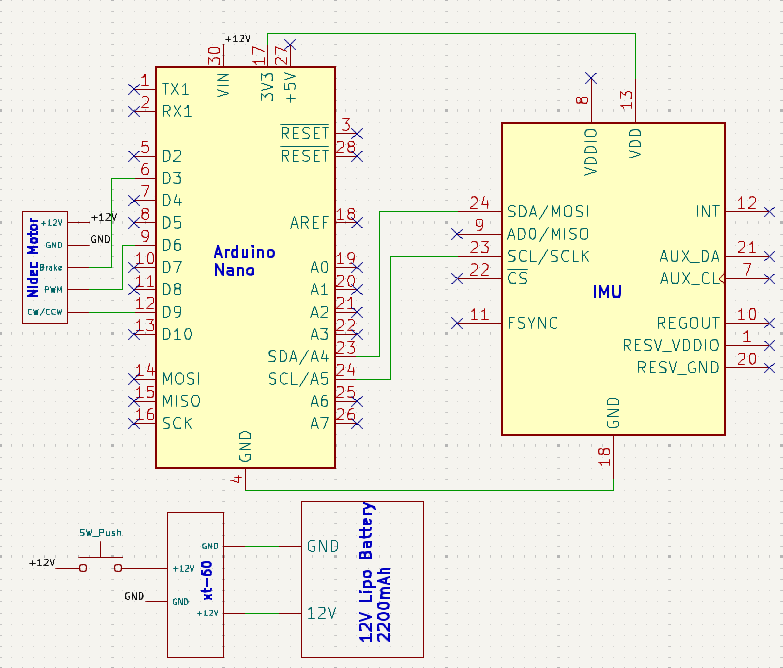
Our electrical system consisted of a 12V Nidec brushless servo motor driven by a PWM signal generated by an Arduino Nano. The Nidec motors had a built-in drive, so no external motor drive circuit such as an electronic speed controller (ESC) was required which simplified our design. All necessary connections were made on a perforated board (perf board), which also supported the Arduino Nano. To obtain positional data of the cube, we used an MPU9250 inertial measurement unit (IMU), providing both accelerometer and gyroscope readings. The IMU was connected to the Arduino Nano through the same perf board.
For power, we employed a 2200 mAh, 12V LiPo battery. This battery was linked to the Arduino Nano via the perf board and a switch for controlled activation/deactivation. Since the Nano has an onboard voltage regulator, even though we were supplying 12V, the regulator steps it down to a safe operating voltage of 5V. This allows the microcontroller on the Nano and the IMU to function without being damaged by the higher input voltage. An XT60 connector facilitated the connection of the battery to the system’s power input.
Click on the red dots or read below to understand each part
| Part | Description | Image |
|---|---|---|
| 12V Nidec Brushless Servo Motor | A high-performance motor capable of precise speed and position control when driven by a pulse-width modulated (PWM) signal. It connects to our flywheel via the motor shaft to generate rotational energy that allows our cube to balance. |
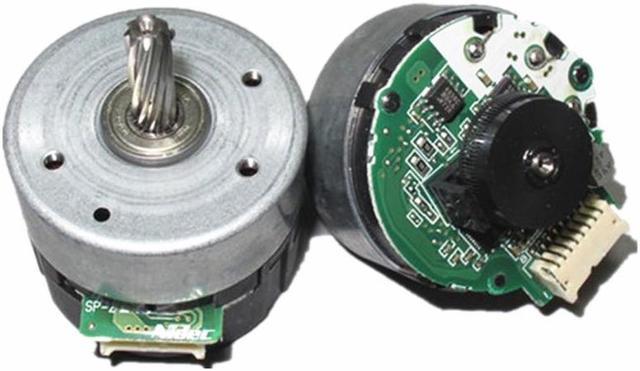
|
| Arduino Nano | Microcontroller used for generating PWM signals for the servo motor and processing sensor data from the IMU. |
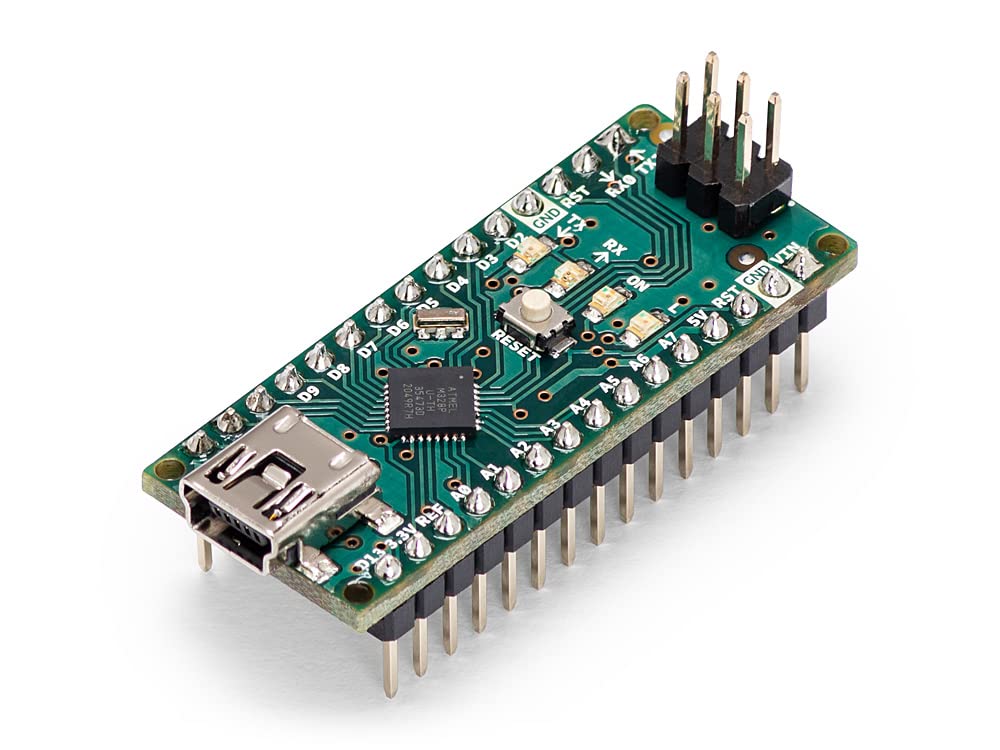
|
| Perforated Board | A prototyping board with pre-drilled holes and copper pads that was used for securely mounting and interconnecting the Arduino Nano, motor connections, and IMU through electrical soldering. |
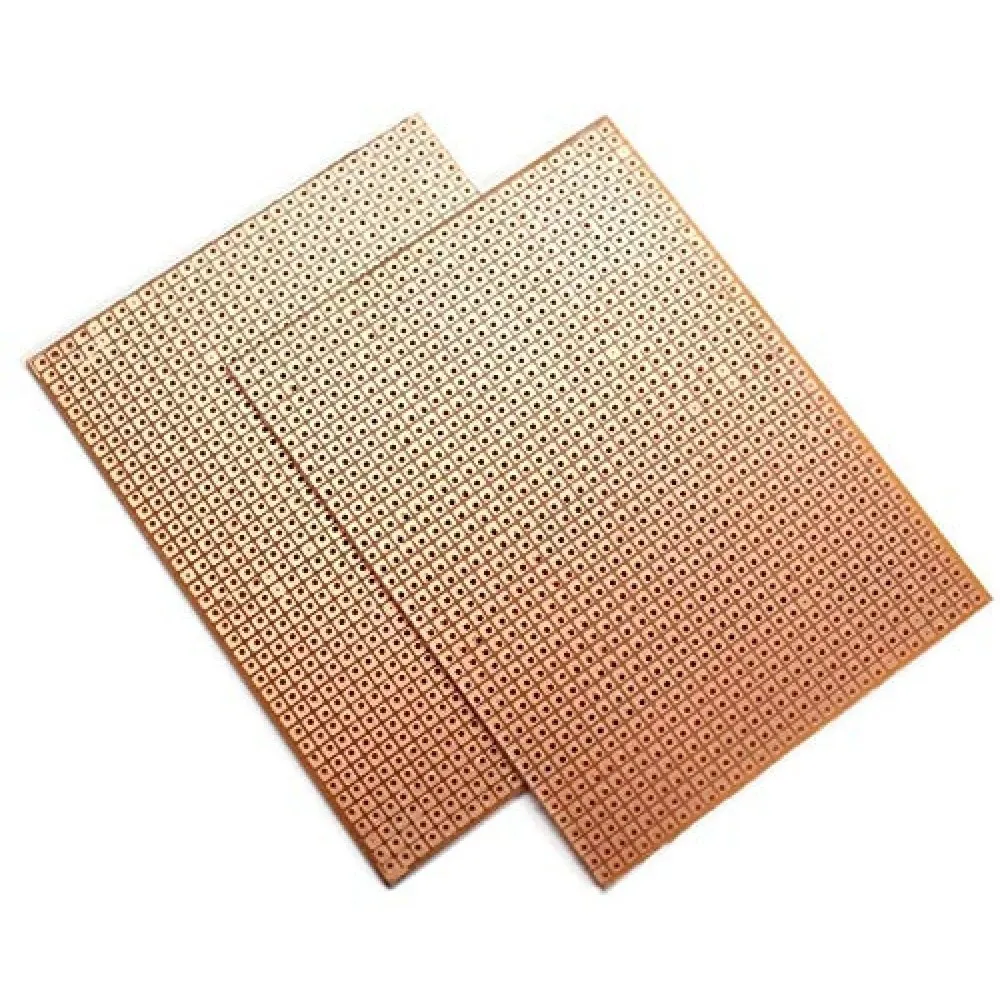
|
| XT60 Connector | High-current DC connector used to link the LiPo battery’s output to the system, ensuring a secure power connection. |

|
| 2200 mAh, 12V LiPo Battery | A rechargeable battery providing a stable 12V supply and sufficient capacity to power the motor, control electronics, and sensors. |

|
| Switch | A manual power control component integrated into the circuit to enable or disable the entire system’s power from the battery. |
|
| MPU9250 (IMU) | An inertial measurement unit that combines a 3-axis accelerometer, 3-axis gyroscope, and a 3-axis magnetometer, providing real-time orientation, movement, position, and magnetic field data for enhanced system analysis and control feedback. |
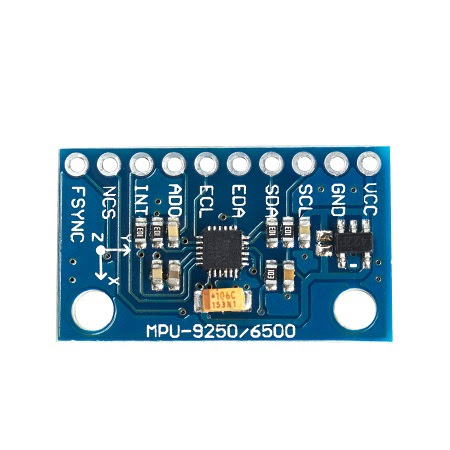
|